
INDIを利用したLinux環境で動く極軸合わせツールです。PoleNavigator ライクなツールとお考え下さい。
INDIクライアントとして動作しているので、カメラはINDIで動かせるものでストリーミングに対応しているものが使用できます(一眼とかは無理かも)
今のところ、なんとなく動くバージョンです(^^;
あくまでもベータ版なので動いたらラッキー程度でご利用ください。
レポートなどはウェルカムです!
ChangeLog 0.3.0 -> 0.4.0
- ダークフレームを使用できるようになりました。
- 一部コードの停止、最適化
ダウンロード
インストール
Ubuntu環境において、適当なディレクトリにアーカイブを解凍してください。
内容物は下記の通り。
indipolar.py スクリプト本体
indipolar.ini 設定ファイル
indipolar.ui GUIデザイン
indipolar_setting.ui GUIデザイン
必須ライブラリなど
動作に必要なライブラリやパッケージなどをインストールする必要があります。
すでにインストールされているものあるかもしれません。ここに挙げたもの以外が必要になる場合がありますので、その時は自身で調べて不足パッケージをインストールしてください。
こちらの方法をお試しください。
動作させるには、この部分の敷居が高いと思われます。
RasPiOSとかStellarMate的な何かとか環境が分からないのでそのままでは動作しないかもしれません。
■PyQt5
■OpenCV
■python-indicli
■astropy
■astrometry.net
indipolarでは、solve するのに astrometryのツール を使用しています。
インストール手順はこの辺りにありますので、インストールしてください。
indipolar起動
解凍したフォルダに移り、コマンドラインより
$ python3 ./indipolar.py
indipolar.ini
indipolar.ini が設定ファイルになります。INDIサーバーやカメラ、solverの設定などを書いておきます。
window_width = 1300
window_height = 960
表示ウィンドウのサイズです。小さすぎるとUIが変になります。
host = localhost
port = 7624
INDIサーバーのアドレスとポート設定です。ローカルで動かすときは localhostでOK。
ccd = QHY CCD
exposure = 2.0
gain = 65
encoder = MJPEG
length = 50
pixel = 0.0
カメラとレンズの設定です。
ccdは使用するカメラの名称を記述します。INDIコントロールパネルで表示されるカメラ名称を書いておきます。
カメラはこの設定と部分マッチで検索しますので、QHY CCD だけだと、最初に見つかったQHYのカメラを使うような設定になります。
複数カメラをつないでいる場合(たいがいはそうですが)詳細な名称まで書いてください。(例:QHY CCD QHY5II-M-10dxxx)
exporue は露出時間(秒)です。
gain はカメラゲインです。
encoder はカメラストリーミングのエンコーダー設定です。RAWかMJPEGのどちらかになると思います。
length レンズの焦点距離です。単位はmm
pixel カメラ素子のサイズです。(μm)0.0の場合、INDIサーバー側で設定しているカメラのピクセルサイズをそのまま使用します。
solarg = -5 10 -O --sigma 5 --no-verify --no-plots --crpix-center --axy none --corr none --index-xyls none --match none --rdls none
Solverの設定です。
solve-fieldコマンドのオプションを記述しておきます。
ちなみに、
$ python3 indipolar.py --list
と--listオプションで起動すると、INDIサーバーに接続されたデバイス一覧を表示します。
CCD名が分からない場合などに利用してください。
使い方
- 起動前に使用するカメラに合わせたINDIサーバーを起動しておきます。
INDI server managerなどで起動しておけばOK。 - 北極星に向けた鏡筒に載せた極軸合わせ用カメラを使います。
- 鏡筒を右に90度近く回して、Phase1ボタンを押す。解析成功ならPhase2に移行。
- 鏡筒を左に90度近く回して、Phase2ボタンを押す。解析成功ならPhase3に移行。
- 鏡筒をホーム位置に戻して、Phase3ボタンを押す。解析成功なら修正ベクトルが表示される。
※3. ~ 5. の鏡筒回転方向は順不同でOK。違う角度の3点が取れればよいです。 - 北極星をターゲットマーカーまで移動するように、架台を調整する。
- 極軸合わせ完了
現状の問題点
- 初期起動時に失敗してコアダンプすることがあります。
(多分、INDIとの初期通信でタイムアウトしている感じ) - 初期画像が出力されるのが遅い。起動してしばらくしないと画が出ません。
- 北極星が視野に入っていないとダメ。修正ベクトル処理に北極星を利用しているため。
- 画像が荒いとsolve失敗を連発する。画像のコントラストとノイズの影響を受けやすいようです。
- コードが汚い。取って付けたコードなので整理します(^-^;
ダークフレームの取得方法
- カメラキャップをして画像を真っ暗にします。
- indipolar の Setting を開きます。
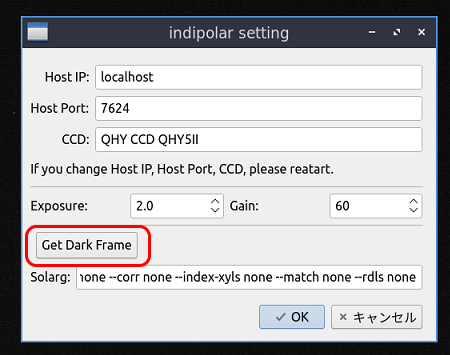
- 「Get Dark Frame」ボタンを押下します。
メッセージエリアに取得したダークフレームファイルが出力されます。
ダークフレームファイルはデフォルトでDarkFrame.png です。

ダークフレームを使用する
メイン画面左下に、「Use Dark Frame」チェックボックスがあるので、チェックオンにするとダークフレームを引いて画像出力されます。


0 件のコメント:
コメントを投稿